
Principles and Application Comparison of TOF / TDOA / PDOA Algorithms
In Ultra-Wideband (UWB) positioning and autonomous following systems, TOF (Time of Flight), TDOA (Time Difference of Arrival), and PDOA (Phase Difference of Arrival) are three fundamental ranging/angle estimation algorithms. Understanding their principles, advantages, limitations, and application scenarios is essential for ensuring product stability, controlling cost, and optimizing user experience.
This article provides an in-depth technical explanation of the three algorithms, discusses how the TOF “propagation time Δt” is derived, and presents a comparative analysis to support engineering decisions and product planning.
1. Algorithm Fundamentals
1.1 TOF (Time of Flight)
Principle
TOF measures the propagation time Δt of a signal traveling from transmitter to receiver, then multiplies it by the speed of light c to obtain distance:
![]()
- One-way TOF requires highly synchronized clocks between transmitter and receiver.
- Two-Way Ranging (TWR) avoids strict synchronization: one device sends a request, the other responds, and the round-trip time is measured.
How is propagation time Δt obtained?
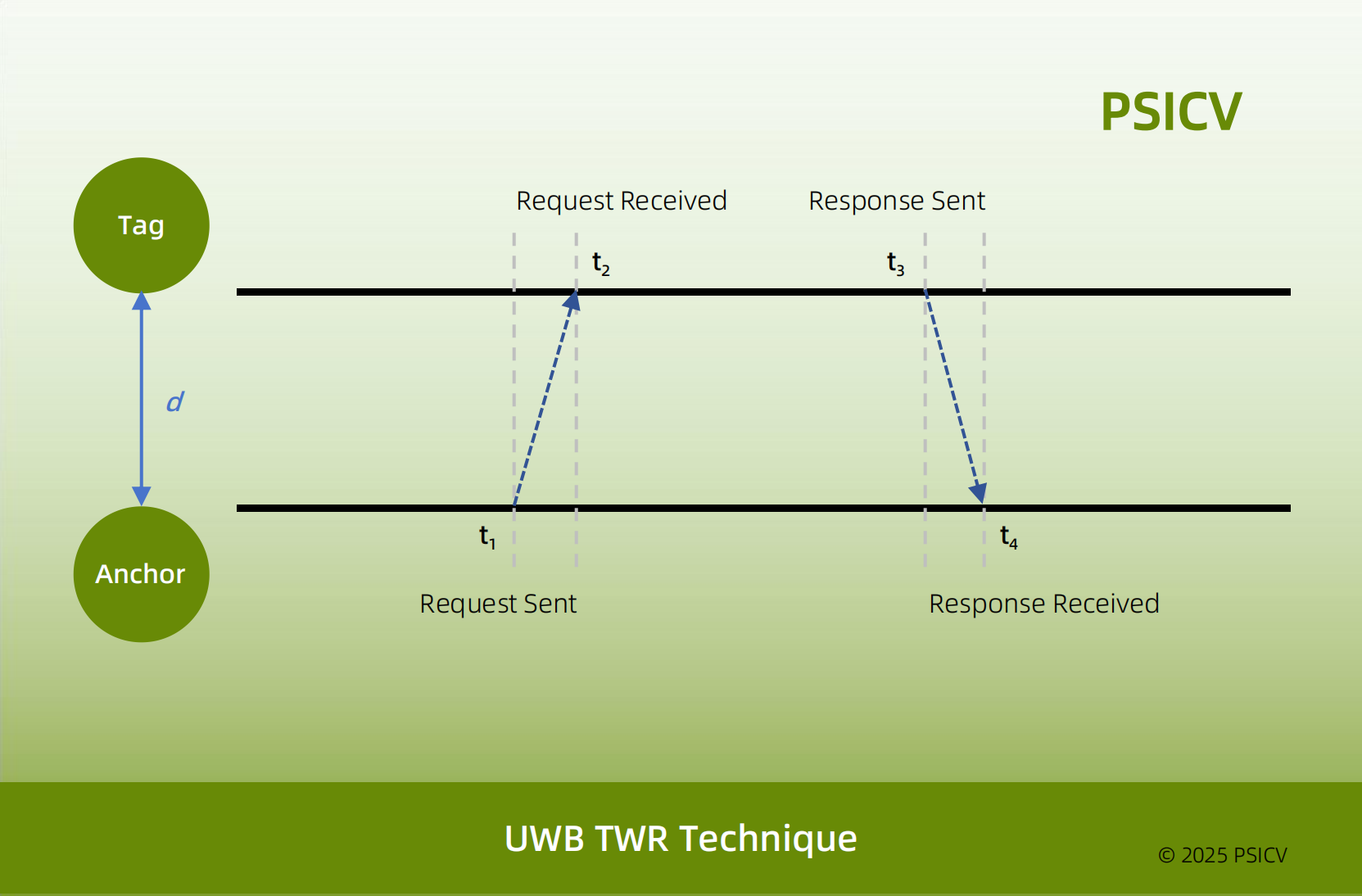
Consider a symmetric double-sided TWR scheme:
|
Satge |
Timestamp |
Description |
|
Request sent |
t1 |
Anchor transmits request, records time t1 |
|
Request received |
t2 |
Tag receives request |
|
Response sent |
t3 |
Tag transmits response, records t3 |
|
Response received |
t4 |
Anchor receives response, records t4 |
 Round-trip time (RTT) is:
Round-trip time (RTT) is:
![]()
Propagation time (one-way) is:
![]()
Thus distance:
![]()
Pros & Cons
|
Pros |
Cons |
|
Direct principle, high ranging accuracy (centimeter-level under good conditions) |
Sensitive to processing delay errors; requires LOS (Line-of-Sight) for accuracy; one-way TOF demands tight clock sync |
1.2 TDOA (Time Difference of Arrival)
Principle
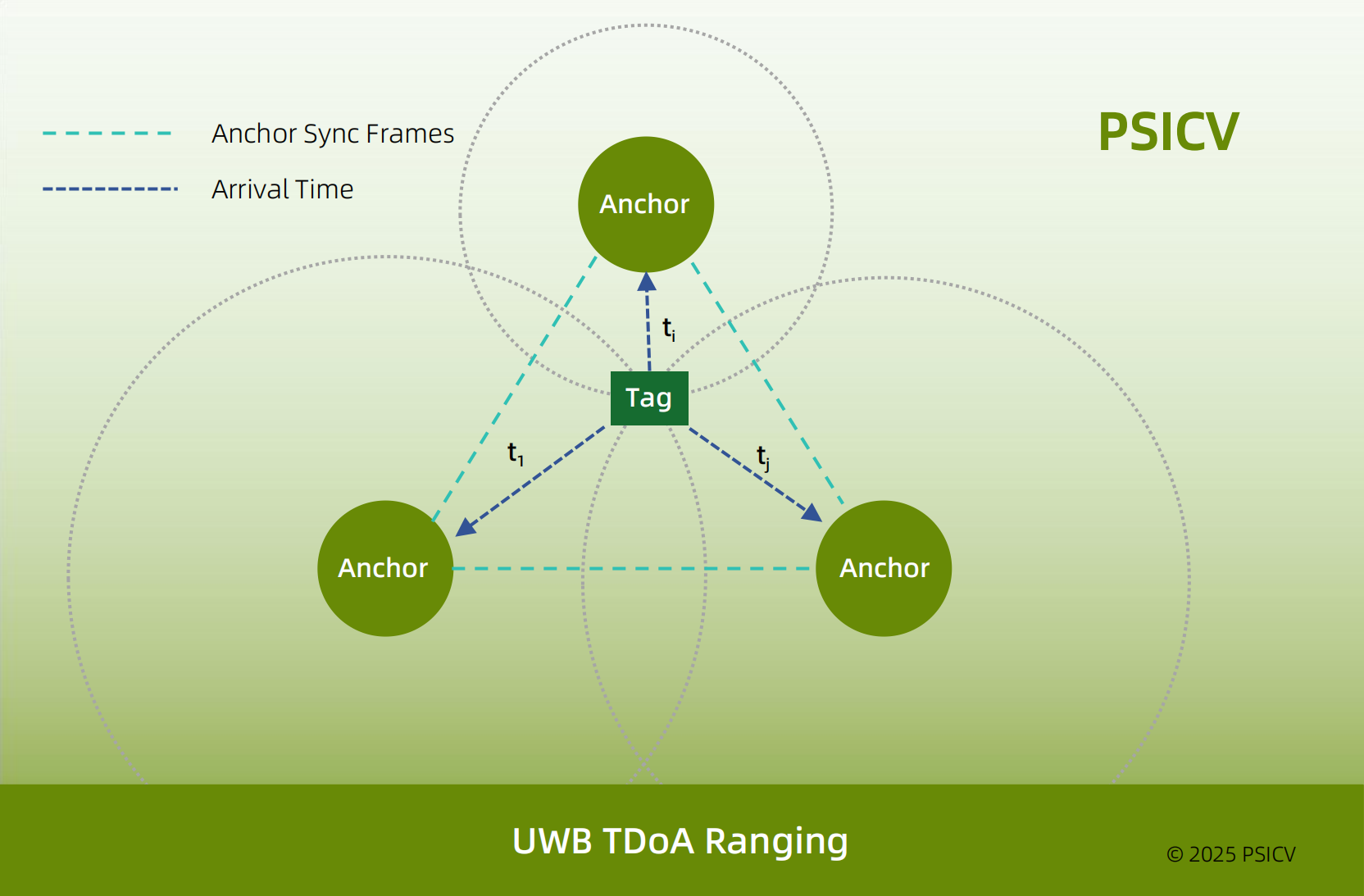
A tag transmits a signal; multiple anchors receive it. The time difference of arrival between anchors Δtij gives distance difference:
![]()
With enough anchors, hyperbolic equations can be solved to estimate the tag’s position.
Pros & Cons
|
Pros |
Cons |
|
Tag only transmits (low power); high update rate; scalable in large areas |
Requires precise anchor synchronization (nanosecond level); errors increase in multipath or NLOS |
1.3 PDOA (Phase Difference of Arrival)

Principle
Multiple antennas receive the same signal. A phase difference Δφ is measured between antennas spaced by d, giving angle of arrival θ:

- λ = wavelength
- Solve for θ to obtain angle.
Distance capability?
- Pure PDOA → only angle, not distance.
- PDOA combined with TOF/TDOA → enables both distance and angle.
- Multi-frequency PDOA → can resolve phase ambiguity and infer distance, but hardware/algorithm complexity increases.
2. Comparative Analysis
|
Algorithm |
Measurement |
Accuracy(typical) |
Sync demand |
Update rate |
Tag power |
Applications |
|
TOF |
Distance |
±5–10 cm LOS |
Medium (relaxed in TWR) |
Medium |
Higher (tag responds) |
Peer-to-peer ranging |
|
TDOA |
Position via hyperbolas |
10–30 cm (depends on sync/env) |
High (anchor sync) |
High |
Very low |
Warehousing, logistics, indoor positioning |
|
PDOA |
Angle of arrival |
1–5° (depends on array) |
High (antenna phase sync) |
Med–High |
Low–Med |
Angle-based tracking, smart cameras, following suitcase |
3. Engineering Insights
- Timestamp precision: Accuracy directly tied to clock stability.
- Hardware delay calibration: TOF requires correction for processing delays to avoid bias.
- Multipath/NLOS mitigation: Use CIR (Channel Impulse Response) analysis, RSSI ratios, or filtering.
- Algorithm fusion: Best practice is hybrid — e.g., TOF for distance, PDOA for direction, IMU/vision for robustness.
- System tuning: Antenna spacing, frequency band, deployment geometry all impact accuracy/cost.
4. Example Applications
- Autonomous following luggage
TOF gives distance, PDOA provides bearing → suitcase follows from diagonal rear. - Warehouse asset tracking
TDOA with multiple anchors covers wide area → tags remain lightweight and low-power. - Smart camera auto-tracking
PDOA determines angle → camera rotates to follow subject; TOF adds distance for zoom adjustment.
5. Conclusion
Each algorithm has clear trade-offs:
- TOF → high ranging precision, but requires handling of delays.
- TDOA → scalable for large areas, but demands tight synchronization.
- PDOA → accurate angle, but needs array calibration and usually fused with TOF/TDOA.
In practice, hybrid approaches deliver the best results. For consumer robotics and autonomous following products, combining TOF/TDOA/PDOA with IMU or vision ensures robust, user-friendly performance in real-world environments.
